Introduction
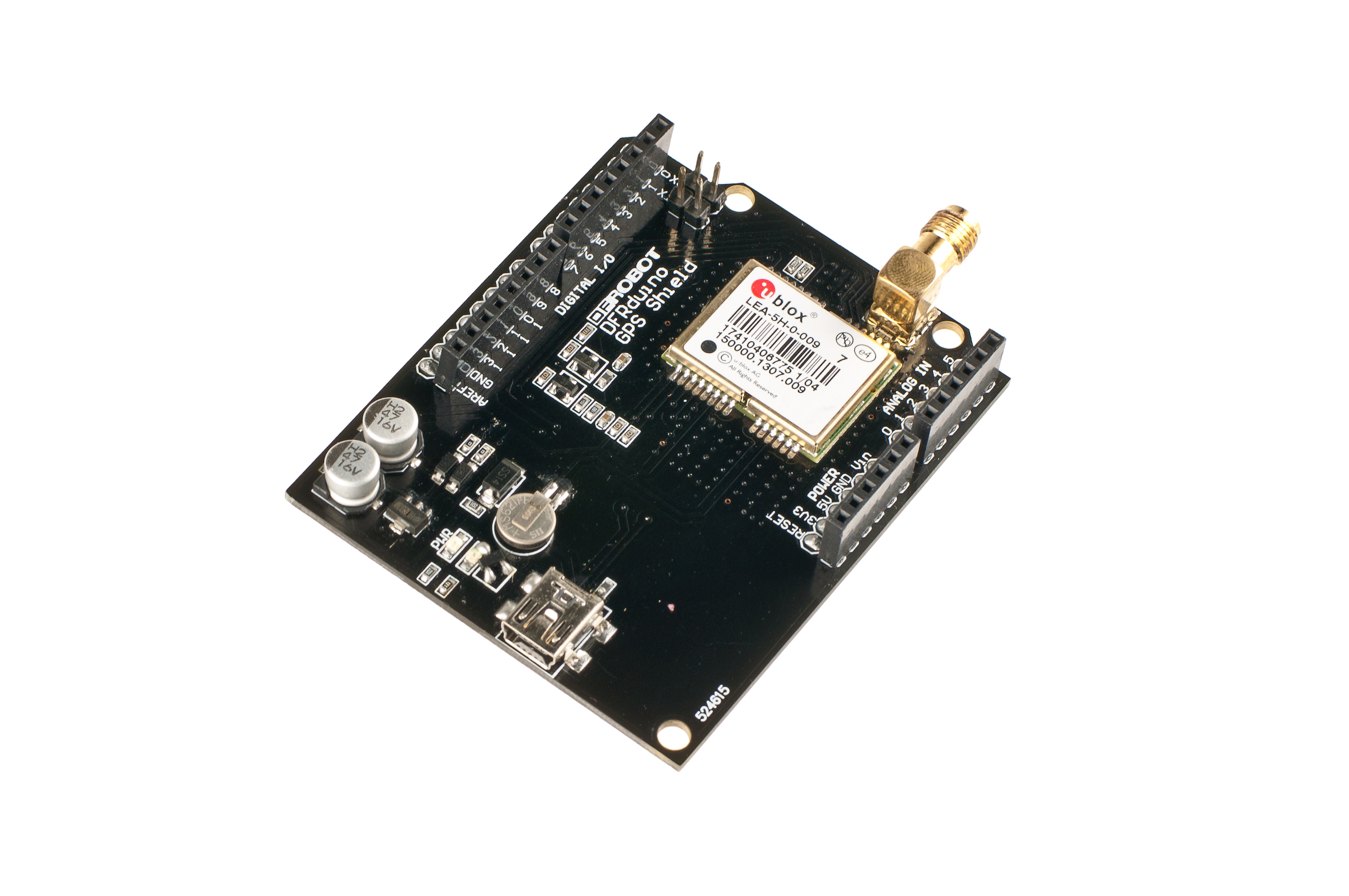
The LEA-5H is a high performance stand-alone GPS and GALILEO receiver module designed to allow easy, straightforward migration from its LEA-4 predecessors. It features u-blox' KickStart weak signal acquisition technology, as well as flexible connectivity options. The LEA-5H comes with built-in Flash memory that enables firmware updates and the storage of specific configuration settings in a non-volatile RAM. The built-in antenna supervisor supports external and active antennas, such as u-blox' ANN high performance GPS antenna.
u-blox KickStart provides accelerated startup at weak signals, and our featured SuperSense® Indoor GPS is capable of tracking and acquiring even extremely weak signals. This makes the LEA-5H suitable for solutions using small or covert antennas.
Specification
- Easy migration from LEA-4H and LEA-4P modules
- Accelerated startup at weak signals thanks to KickStart Technology
- Operating voltage: 2.7 - 3.6 V
- LEA-5H Reference design documentation available with ceramic or GeoHelix antenna, UART and USB
- 2 Hz position update rate
- Built-In Flash memory for fimware upgrades and storage of specific configuration settings
- Antenna supervisor and supply
- Antenna short and open circuit detection and protection for external antennas
- 1 UART, 1 USB and 1 DDC (I2C compliant) interface
- GALILEO-ready
- 50-channel u-blox 5 engine with over 1 million effective correlators
- Under 1 second Time-To-First-Fix for Hot and Aided Starts
- SuperSense® Indoor GPS: -160 dBm tracking sensitivity
- Supports AssistNow Online and AssistNow Offline A-GPS services; OMA SUPL compliant
- Supports SBAS (WAAS, EGNOS, MSAS, GAGAN)
- Operating temperature range: -40 to 85°C
- RoHS compliant (lead-free)
Sample Code
#if defined(ARDUINO) && ARDUINO >= 100
#include "Arduino.h"
#define WireSend(args) Wire.write(args)
#define WireRead(args) Wire.read(args)
#define printByte(args) Serial.write(args)
#define printlnByte(args) Serial.write(args),Serial.println()
#else
#include "WProgram.h"
#define WireSend(args) Wire.send(args)
#define WireRead(args) Wire.receive(args)
#define printByte(args) Serial.print(args,BYTE)
#define printlnByte(args) Serial.println(args,BYTE)
#endif
#include <Wire.h>
#define BUFFER_LENGTH 10
int GPSAddress = 0x42;
double Datatransfer(char *data_buf,char num)
{
double temp=0.0;
unsigned char i,j;
if(data_buf[0]=='-')
{
i=1;
while(data_buf[i]!='.')
temp=temp*10+(data_buf[i++]-0x30);
for(j=0;j<num;j++)
temp=temp*10+(data_buf[++i]-0x30);
for(j=0;j<num;j++)
temp=temp/10;
temp=0-temp;
}
else
{
i=0;
while(data_buf[i]!='.')
temp=temp*10+(data_buf[i++]-0x30);
for(j=0;j<num;j++)
temp=temp*10+(data_buf[++i]-0x30);
for(j=0;j<num;j++)
temp=temp/10 ;
}
return temp;
}
void rec_init()
{
Wire.beginTransmission(GPSAddress);
WireSend(0xff);
Wire.endTransmission();
Wire.beginTransmission(GPSAddress);
Wire.requestFrom(GPSAddress,10);
}
char ID()
{
char i = 0;
char value[7]={
'$','G','P','G','G','A',',' };
char buff[7]={
'0','0','0','0','0','0','0' };
while(1)
{
rec_init();
while(Wire.available())
{
buff[i] = WireRead();
if(buff[i]==value[i])
{
i++;
if(i==7)
{
Wire.endTransmission();
return 1;
}
}
else
i=0;
}
Wire.endTransmission();
}
}
void UTC()
{
char i = 0,flag=0;
char value[7]={
'$','G','P','G','G','A',',' };
char buff[7]={
'0','0','0','0','0','0','0' };
char time[9]={
'0','0','0','0','0','0','0','0','0' };
double t=0.0;
while(1)
{
rec_init();
while(Wire.available())
{
if(!flag)
{
buff[i] = WireRead();
if(buff[i]==value[i])
{
i++;
if(i==7)
{
i=0;
flag=1;
}
}
else
i=0;
}
else
{
time[i] = WireRead();
i++;
if(i==9)
{
t=Datatransfer(time,2);
t=t+80000.00;
Serial.println(t);
Wire.endTransmission();
return;
}
}
}
Wire.endTransmission();
}
}
void rec_data(char *buff,char num1,char num2)
{
char i=0,count=0;
if(ID())
{
while(1)
{
rec_init();
while(Wire.available())
{
buff[i] = WireRead();
if(count!=num1)
{
if(buff[i]==',')
count++;
}
else
{
i++;
if(i==num2)
{
Wire.endTransmission();
return;
}
}
}
Wire.endTransmission();
}
}
}
void latitude()
{
char lat[10]={
'0','0','0','0','0','0','0','0','0','0' };
rec_data(lat,1 ,10);
Serial.println(Datatransfer(lat,5),5);
}
void lat_dir()
{
char dir[1]={'0'};
rec_data(dir,2,1);
printlnByte(dir[0]);
}
void longitude()
{
char lon[11]={
'0','0','0','0','0','0','0','0','0','0','0' };
rec_data(lon,3,11);
Serial.println(Datatransfer(lon,5),5);
}
void lon_dir()
{
char dir[1]={'0'};
rec_data(dir,4,1);
printlnByte(dir[0]);
}
void altitude()
{
char i=0,count=0;
char alt[8]={
'0','0','0','0','0','0','0','0' };
if(ID())
{
while(1)
{
rec_init();
while(Wire.available())
{
alt[i] = WireRead();
if(count!=8)
{
if(alt[i]==',')
count++;
}
else
{
if(alt[i]==',')
{
Serial.println(Datatransfer(alt,1),1);
Wire.endTransmission();
return;
}
else
i++;
}
}
Wire.endTransmission();
}
}
}
void setup()
{
Wire.begin();
Serial.begin(9600);
Serial.println("DFRobot DFRduino GPS Shield v1.0");
Serial.println("$GPGGA statement information: ");
}
void loop()
{
while(1)
{
Serial.print("UTC:");
UTC();
Serial.print("Lat:");
latitude();
Serial.print("Dir:");
lat_dir();
Serial.print("Lon:");
longitude();
Serial.print("Dir:");
lon_dir();
Serial.print("Alt:");
altitude();
Serial.println(' ');
Serial.println(' ');
}
}
 NOTE: When you use above code.Please unplug the jumper caps before you upload the code to Arduino.And when it has been finished, don't forget to plug it back.
NOTE: When you use above code.Please unplug the jumper caps before you upload the code to Arduino.And when it has been finished, don't forget to plug it back.
More Documents