Introduction
At the beginning,the inertial measurement unit is an electronic device that measures and reports on a craft's velocity, orientation, and gravitational forces, using a combination of accelerometers,gyroscopes, and magnetometers. Now IMUs are commonly used in the Human-computer interaction(HCI), navigational purposes and balancing technology used in the Segway Personal Transporter as we all known.
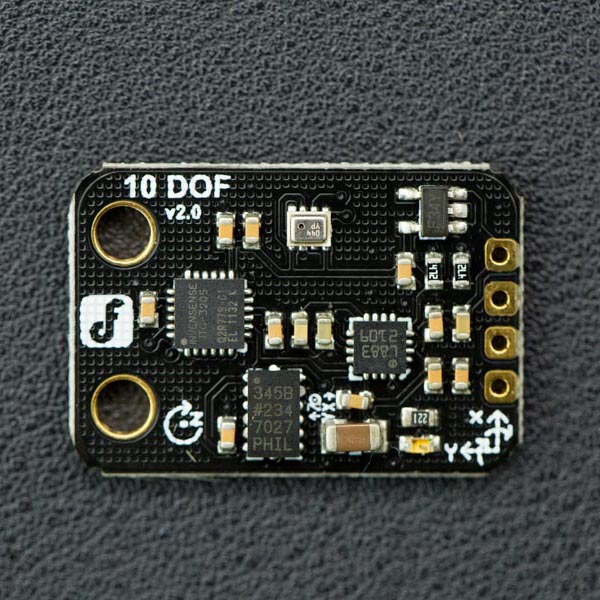
Version Upgrade: V2.0 has upgraded the barometer sensor IC to BMP280.
Applications
- Aircraft
- Balancing robots
- Indoor inertial navigation
- Altimeter
- Human–computer Interaction (HCI)
Specification
- Wide power input range from 3 to 5 volts
- Low noise LDO regulator
- Low cost IMU
- Interface: I2C
- M3x2 mounting holes for easily fixing in your mobile platforms,robots,HCI or UAVs
- LED power indication
- Integrate 10 dof sensors
- Adxl345 accelerometer
- ITG3200 gyro
- VCM5883L Compass
- BMP280 temperature & barometer sensor
- Compact size design and easy-to-use
- Compatible with Arduino controllers
- Electricity gold PCB
- Size: 26x18mm
Connection Diagram

Sample Code 1
Please download following library first.
Open the arduino IDE serial monitor, you will get Yaw; Pitch; Roll value:

Sample Code 2
BMP280 Barometer & Temperature Test

More Documents
[Historic WiKi V1.0](https://www.dfrobot.com/wiki/index.php/10_DOF_Senso r__SKU:SEN0140_)
Related Resource