Introduction
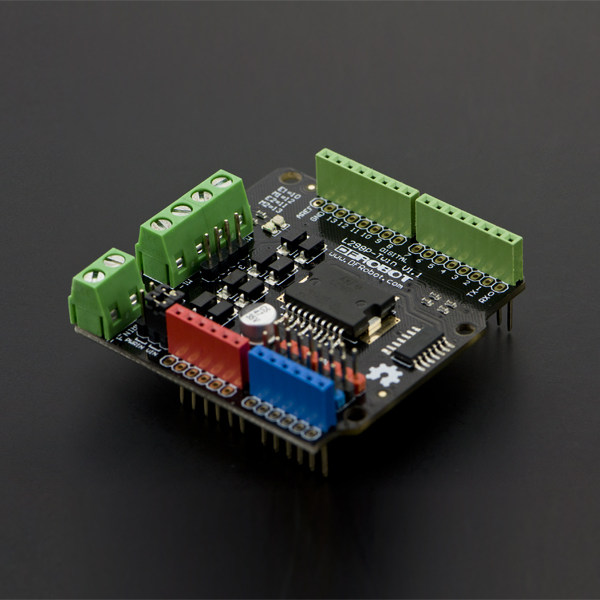
This motor shield allows Arduino to drive two channel DC motors. It uses a L298N chip which deliveries output current up to 2A each channel.
Specifications
- Motor Driven Voltage: 4.8V to 35V
- Output Current: up to 2A/channel
- Total Power Dissipation: 25W(T=75℃)
- Driven Structure: Dual full-bridge driver
- Driven Power Port: External power terminal, or VIN from Arduino
- Driven Output Port: 2 channel screw terminals, or male PIN headers
- Control Port: 4 TTL Compatible digital signals (Digital 10-13)
- Operation Temperature: -25℃ to 130℃
- Shield Size: 56x57mm
Application
- Electric toy car
PinOut

- Power Selection Jumper: The motors can be powered by external power supply(PWMIN) or VIN from Arduino control board(e.g., UNO). Default is VIN showed by the diagram. Note: There are two jumpers in parallel that can afford heavy current.
PWMIN Terminal: Used to connect to external power.
Motor Terminal: Used to connect motors by screw terminals(M1- M1+ M2- M2+) or PIN headers(1 2 3 4).
Analog 3Pin Port: Used to connect sensors or actuators. Note: pinout is (+ - S).
Motor Indicator: The red LED lights if Mn+ is positive, whereas the green LED lights.
Control Port: Used to control speed and direction of motor. You can get port's description in the "Control Table" printed on the shield.
- Control Function Table:
| Name | Function |
|---|---|
| En | Mn Speed control(PWM) |
| Mn | Mn Direction Control |
- Control Signal Truth Table:
| En | Mn | State |
|---|---|---|
| L | X | Disable Mn |
| H | L | Mn Foreward(Mn+ is positive) |
| H | H | Mn Backward(Mn+ is negative) |
Note: n of "Mn" or "En" is 1, 2
Tutorial
DC Motor Control
Target: Control speed and direction of DC motor
Step1: Hardware List
- DF_UNO 1
- Micro Metal Gearmotor 2
- Regulated Power 1
- The Shield 1
- Wires
Step2: Software List
Step3: Wiring

Step4: Sample Code
- Open Arduino IDE
- Upload the code to UNO
Step5: Result
M1 will forward at full speed, and then half speed inversion; M2 velocity from fast to slow, reverse first, and then forward.
FAQ
More question and cool idea, visit DFRobot Forum