Introduction
Flymaple is a Quadcopter controller board, based on the Maple Project. The FlyMaple embeds a STM32F103RET6 (ARM Cortex-M3) as it's main MCU. It integrates a 3-Axis accelerometer,a 3-Axis gyroscope,a 3-Axis compass and a barometric pressure sensor. By using the 10 dgrees of freedom IMUs and powerful 72MHz high-performation microcontroller, flymaple is powerful enough to handle a complex algorithm and manage a robot motion system at the same time.
The design of flymaple is based on the maple, which is an arduino sytle ARM processor. The Maple IDE will make Processing/Arduino programmers feel right at home. If you're familiar with Arduino then you can get started with the Maple IDE quite easily.
Flymaple is aimed to run on the balancing robots,mobile platform,helicopters and quadcopters which require IMUs and high performance real time controllers. It has an amazing scalability, because it's compatible with the Arduino shields. FlyMaple extends 6 PWM channels and 8 channels for GPIO for controlling ESC/Servo and capturing RC receiver input.
Applications
- Aircraft
- Balancing robots
- Indoor inertial navigation
- Altimeter
Specification
Working Voltage: 5v
7~12v External Power supply from the 2p JST connector
Output Voltage: 3.3v/5v or External input power
Microcontroller: STM32F103
Running at 72Mhz with 32bit Arduino sytle ARM processor(Cortex-M3)
Bootloader: Leaflabs Maple RET6 Edition
10 Degrees of Freedom on a single, flat board:
- ITG-3200 - triple-axis digital-output gyroscope
- ADXL345 - 13-bit resolution, ¡À16g, triple-axis accelerometer
- HMC5883L - triple-axis, digital magnetometer
- BMP085 - high-precision barometric pressure sensor
Programable through an Arduino-based development environment - Maple IDE
Compatible with most of Arduino shields
Extends 6 channels PWM pins for controlling ESC/Servo
Extends 8 channels GPIO for capturing RC receiver output
3x 4p JST connectors:
- Serial port 1
- GPS extension port
- I2C interface
Size: 50x50x12mm
Weight: 15g
Windows System Driver
- Plug the Maple board into the computer
- Open Device Manager
- Switch Maple board into continuous Bootloader mode (hit reset until you get the fast blinks followed by slower blinks;and immediately hit and hold the boot button until it changes into slow blink mode,release).
- It should show some broken USB device in your Devices, not a com-port.
- Download the Maple IDE for windows, and extract somewhere.
- Select manually select the driver location, select Maple IDE directory "maple-ide-0.0.12-windowsxp32/drivers/mapleDrv / dfu directory, to install the driver.
Note:
It also supports WIN 7/8 64-bit.
Note that while these instructions work on Windows XP, changes in Windows 7/8 mean that you won’t be able to install the IDE without disabling driver signing on your computer.
Download the binary libUSB package (https://sourceforge.net/projects/libusb-win32/files/), extract somewhere (we'll call it c:\LIBUSB)
Run the libusb INF wizard (c:\LIBUSB\bin\inf-wizard.exe)
Click through the dialogs, select maple,and the default values should be fine, or you can fill in some descriptive info.
Save the INF and have it install. It'll produce a big red prompt about the driver being unsigned and problematic; however, it will still work.
"Update" the MAPLE 003 device in your device manager and select the INF file you generated.
To load any program:
- Run the Maple IDE, when you hit the Upload, hit your Reset button on your Maple Board. It should detect and load the data on it. If your compile takes too long, try hitting the reset later in the upload. I used an alternating interval blink to prove it was working to me instead of the straight blink code.
- The serial drivers that came with the Maple IDE package do work fine, so you can use those drivers for the COM port directly.
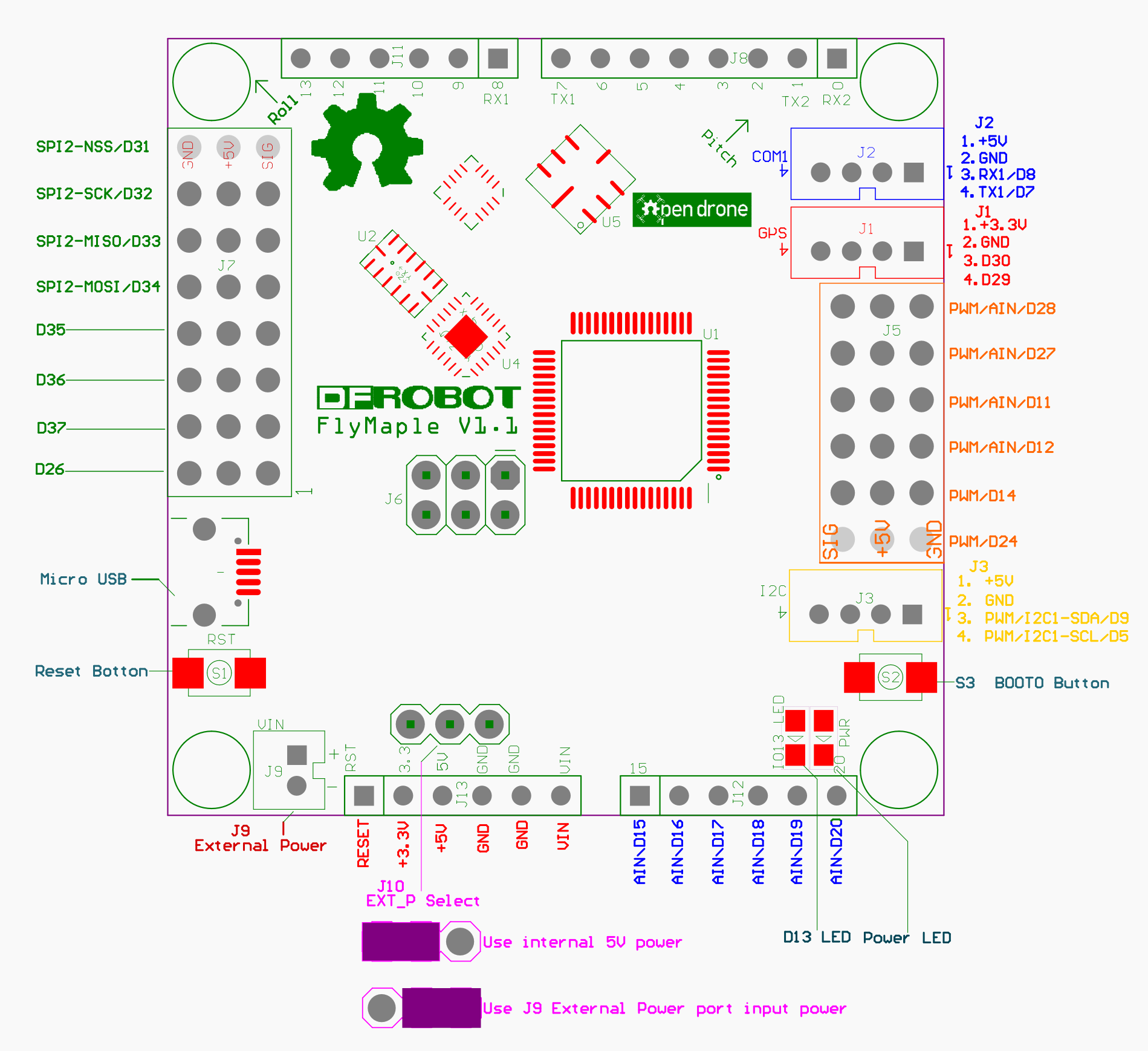
Board Overview
Tutorial
Sample Code
Expected Results
This sample code is a piece of the whole library code for the motor functions, you need to download the library to run the whole sketch which contains this motors code.
More Documents
- Sample code and libraires
- FlyMaple V1.1 Schematics
- Sensor DataSheets
- Maple Project Home
- IDE and Driver installation
- OpenDrone
FAQ
For any questions, advice or cool ideas to share, please visit the DFRobot Forum.