How RTK Technology Enhances Robotic Lawn Mower Precision
Recently, I have observed a multitude of robotic lawn mowers on Kickstarter, and it dawned on me that contemporary weed removal machines have become as intelligent as robotic vacuum cleaners. This realization stirred up memories of my youth, when I would earn pocket money assisting my father in weeding. In those days, manually operating a weed remover in the backyard was a tedious chore, albeit an effective way to while away the hours on a dull afternoon.
Later, the so-called robotic weed removers came into existence. Like early robotic vacuum cleaners, they would randomly traverse the backyard, liberating humans to some extent, but the overlooked tasks still required manual intervention. The discrepancies between the areas dealt with manually and those handled by the robot were visibly patchy from a distance, causing immense discomfort.
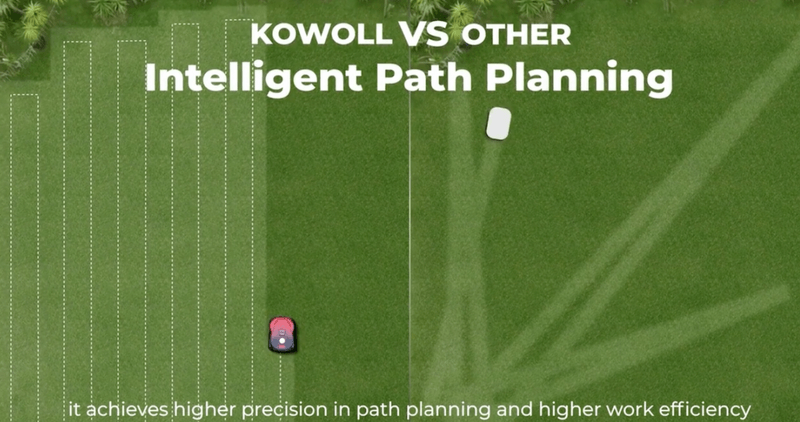
Modern robotic lawn mowers, however, can accurately navigate backyards. Besides incorporating advanced sensors such as lidar and depth cameras, their most notable feature is their centimeter-level positioning accuracy, made possible by RTK technology.
Introduction to RTK Technology
RTK, or real-time kinematics, is a carrier-phase differential technology. Unlike traditional satellite positioning systems, RTK technology utilizes a ground-based reference station network and differential technology to effectively eliminate most errors that occur during satellite signal transmission, thereby achieving high-precision carrier-phase positioning.
In layman's terms, RTK technology has rectified the pervasive 10-meter drift error of previous GPS systems, maintaining positioning accuracy at the centimeter level. How can this precision be described? If the previous accuracy was the length of two Cadillacs, the current one is the size of a fingernail. On the scale of a backyard, this is exceedingly precise. Thus, robotic lawn mowers can now accurately sweep designated areas, just like contemporary robotic vacuum cleaners.
RTK technology is a differential GPS positioning technology relative to traditional GPS single-point positioning. By constructing a continuously operating ground reference station network, it synchronously observes and positions satellites, then differentiates the positioning results of the reference station with the moving station, thereby eliminating most errors generated during satellite signal transmission and improving positioning accuracy. Compared to traditional GPS, RTK technology offers high positioning accuracy, capable of reaching centimeter-level or even millimeter-level; fast positioning response speed, often once per second; and strong anti-interference capabilities.
The Basic Principles of RTK Technology
To understand RTK positioning, one must first learn how GNSS works. In previous articles by Roy, he introduced various outdoor positioning methods, including the GNSS positioning method, wherein GPS is the standout. Here is a brief introduction.
GPS determines the position of the receiver by receiving signals from multiple satellites. Each satellite sends a signal containing its position and transmission time. The receiver calculates the distance by determining the time it takes for the signal to reach the receiver from the satellite, and then uses these distances to calculate its own position.
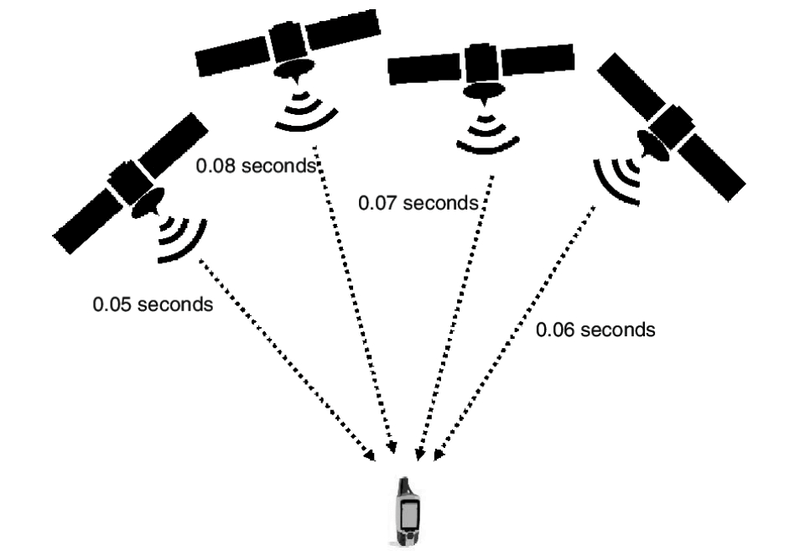
Generally, the data obtained in this way can very accurately calculate the position of the receiver. However, in reality, the satellite signal is influenced by various factors during transmission, such as atmospheric conditions (ionospheric and tropospheric delays) and minor changes in satellite orbits. These factors can cause positioning errors, usually within a range of a few meters.
However, if we perform positioning in a known location, then our positioning will be more accurate. Imagine exploring an unknown location; it is easy to get lost. But if you know you're by a lake in a park, it will be easier to find your position.
Hence, we thought of a method that utilizes a known point for calibration. This is how differential positioning emerged.
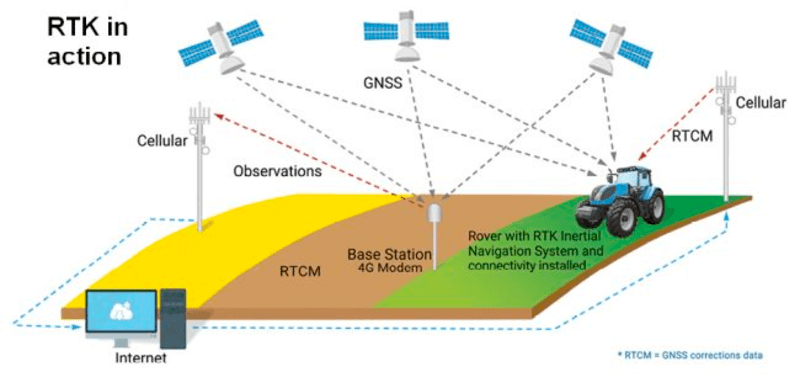
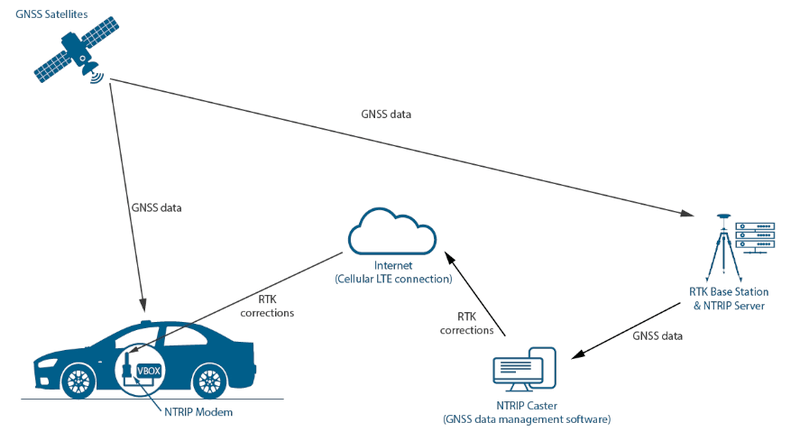
The core idea of differential technology is to use two receivers: a base station at a known location and a mobile receiver (such as the receiver on a robotic lawn mower). The GPS signal received by the base station is also affected by the aforementioned errors. But because the exact location of the base station is known, it can calculate the difference between the actual received signal and the signal it should theoretically receive. This difference is the positioning error.
Then, the base station sends this error information to the mobile receiver in real time. The mobile receiver uses this data to correct its own GPS readings, significantly improving its positioning accuracy. This is known as real-time kinematic differential GPS (RTK GPS). Through this differential correction, the positioning accuracy can be improved from a few meters to a few centimeters, or even higher. This is very important for applications that require high-precision positioning, such as robotic lawn mowers, precision agriculture, surveying, and construction engineering.
However, it is generally believed that within 20 kilometers, the positioning accuracy will decrease correspondingly as the distance between the base station and the mobile station increases by 1km.
For example, if the baseline length to the reference station is 2km, the positioning error is (1cm+10e-6*1*2*10e3=1cm+2mm=)1.2cm.
Comparison of RTK and Traditional GPS Positioning
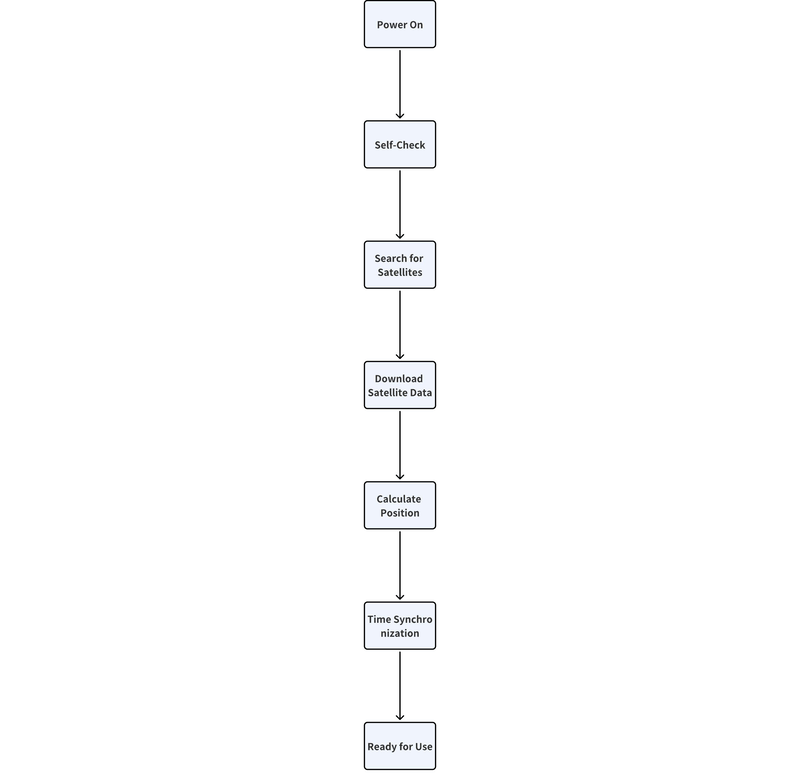
The traditional GPS system typically takes several minutes (at least 5 minutes) to boot, search for satellites, download the ephemeris, calculate the position, synchronize the time, and complete positioning.
On the other hand, with RTK mode, since the base station is always online, the mobile end can directly obtain the ephemeris and time synchronization from the base station, quickly obtain satellite information, and perform positioning. Additionally, because the distance between the base station and the mobile end is closer, different frequency bands are used for communication, making it less likely to be interfered with by external signals and thus more stable.
Application of RTK in Robotic Lawn Mowers
Returning to the topic of robotic lawn mowers, these are functional robots capable of autonomously cruising and weeding in backyards. During operation, they need to accurately cruise along a preset route while using onboard sensing systems such as lidar and depth cameras to perform precise weeding operations.
Therefore, robotic lawn mowers require extremely high accuracy from their own positioning systems. The traditional GPS error is approximately 10 meters. Although the accuracy can be improved by obtaining a large number of multi-frequency signals, including GPS, Glonass, Beidou, and other satellite positioning signals, its accuracy is still at the meter level. RTK technology is one of the key technologies that meet this requirement. By establishing an RTK network between the robotic lawn mower and the ground reference station, the robot can always know its own position and navigation, achieving centimeter-level positioning accuracy, thereby ensuring the precision of weeding operations.
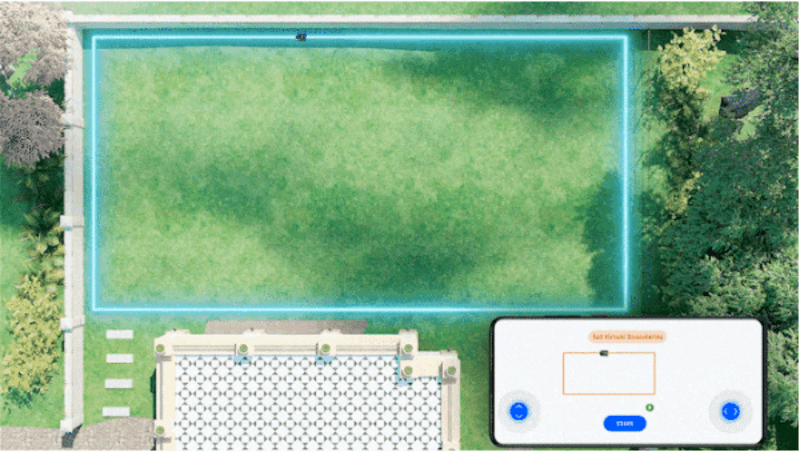
On the Kickstarter project www.kickstarter.com, we see that it uses the RTK system to ensure the precise positioning of the robotic lawn mower, precisely setting the robot's range of movement on the map, giving the range of prohibited operations, and a series of fine positioning operations.

However, RTK is not so easy to implement. Early differential positioning technology was not open to civilian use. It usually required the establishment of expensive ground-based stations, which sent related differential signals to dedicated chips for positioning. With the development of technology, differential positioning base stations are now available for ordinary people to use. So, what are the key technical points for achieving high-precision RTK positioning? Here, I will simply share some with you.
First is the efficient signal processing algorithm. It is not an easy task to obtain information from satellites moving at high speeds in high altitude. We can use full-waveform phase technology to accurately analyze the phase changes of the signal, improving the accuracy and resolution of the measurement. This is like using a telescope to see the veins of leaves in the distance, and the full-waveform phase technology is that microscope.
There are many interferences in our space. The Kalman filter dynamic differential algorithm can effectively suppress noise, allowing the satellite signal to stand out in the noise and let us hear the effective signal more clearly.
The second is the effective correction of various errors. Various disturbances in the atmosphere will have a significant impact on the signal. Therefore, obtaining various meteorological information and helping to establish a meteorological model will help better calibrate errors caused by the environment, especially the airflow impact error of the troposphere. The use of an accurate antenna phase center model also helps to reduce errors. Using an accurate antenna phase center model is necessary to ensure that GPS signals are accurately received and to avoid signal deviations caused by antenna position errors.
Then there is the advanced hardware system design and optimization. If there is a better low-noise amplifier, it is preferable to use it, which can further improve the signal-to-noise ratio. A well-designed antenna is also a very important part. A good antenna can make signal reception much easier. Similarly, for the base station, a stable base or bracket will provide a better base.
Fortunately, these algorithms have been effectively applied to the chip. Therefore, when choosing RTK, you can pay more attention to the related chips.
For example, well-known suppliers such as U-blox and Quectel are renowned in the field of chips.
The chips used in these existing products integrate a large number of advanced algorithms. Some designs even support multi-band reception, simultaneously obtaining information from various satellite positioning systems, including GPS, Glonass, Galileo, Beidou, etc., to perform self-positioning through multi-path signals, significantly reducing the multi-path effect in urban canyons. They can achieve a horizontal positioning accuracy of 1 meter by themselves. In addition, these chips also support NMEA 0183/RTCM 3.x protocols, capable of processing signals from multiple devices.
Some chips also support the Dead Reckoning (DR) method to enhance positioning effects when the signal is not good.
In addition to paying attention to the chip, the antenna of these receivers is also a very important part. A well-designed antenna combined with a chip can achieve capture parameters of -145 dBm, track -165 dBm, and recapture -157 dBm.
Now, mature RTK modules are available on the market. Some modules can provide longitude and latitude coordinates that comply with standard protocols through the serial port. Combined with various other sensors for fusion, high-precision outdoor positioning has become less difficult.
Challenges and Future Development of RTK Technology
Of course, RTK technology is not omnipotent. In some scenarios, there are still some problems. For example, in places where signals are easily blocked, there is still a possibility of disconnection. In addition, there are many possibilities for communication between the base station and the mobile end. Currently, emerging communication methods based on Lora, Nbiot, Cat1, etc. have had a huge impact on RTK.
In addition, how to apply RTK base stations and mobile ends to mature fields in a low-cost, miniaturized, and modular manner has brought new opportunities. I saw a multi-functional snow blower based on RTK on Kickstarter, which was quite impressive. The new miniaturized system makes RTK technology integration and secondary development easier.

Perhaps one day, the automatic planting machines in the film "Interstellar" will be applied on a large scale. Humans will greatly benefit from the popularization of automated production machines, and hunger will no longer be a major problem plaguing mankind. Its popularity and application level will directly affect the development of precision agriculture and other fields and ultimately benefit the majority of agricultural producers.

Conclusion
In conclusion, RTK technology has unique advantages in improving GNSS positioning accuracy. Its application enables robotic lawn mowers to accurately identify operating areas, reducing the possibility of manual intervention. With the further development and use of RTK, more outdoor precision operation businesses will be discovered and implemented in a wider range, not only helping our backyards become cleaner and tidier but also providing considerable imagination for precision agriculture.
Oh, I have a notification. I need to check if my robotic lawn mower is stuck. It seems I need to replace it with a robotic lawn mower with RTK functionality.
Related Articles:
A Comprehensive Analysis of the Most Common Indoor Positioning Technologies You Must Know
A Comprehensive Analysis of the Most Common Outdoor Positioning Technologies You Must Know

This article delves into several common indoor positioning technologies, including Wi-Fi, Bluetooth, RFID, UWB, and geomagnetic indoor positioning.
NEWS
This article will provide a comprehensive analysis of several major outdoor positioning technologies, including the GNSS, RTK positioning, radio positioning, cellular network positioning, and INS.
NEWS
This article introduces the Mind+(Mindplus) editor, which seamlessly combines block-based and text coding in its interface, facilitating an easier transition.
NEWS
I3C improves on I2C with faster speeds, better power efficiency, and advanced features, unlocking greater potential for future embedded systems.
NEWS
Join us at Booth ND32 to explore cutting-edge AI, IoT, and STEM tools like UNIHIKER K10 and Maqueen Plus V3.
NEWS