TUTORIALS Arduino The kit brings 3 touchpads:
DFRobot Capacitive Touch Kit For Arduino
Just follow one of the schematic, to connect them in your arduino board.
Just do to the example folder of your Arduino IDE locate the MPR121 folder and load the example code according to the keypad that you have connected.
Get Started with Capacitive Touch Kit Tutorial
DFRobot
Mar 22 2018 261594
For my next project I'm going to use some capacitive touchpad, and before releasing it, I decided to make a small tutorial about the kit the I received for DFRobot.
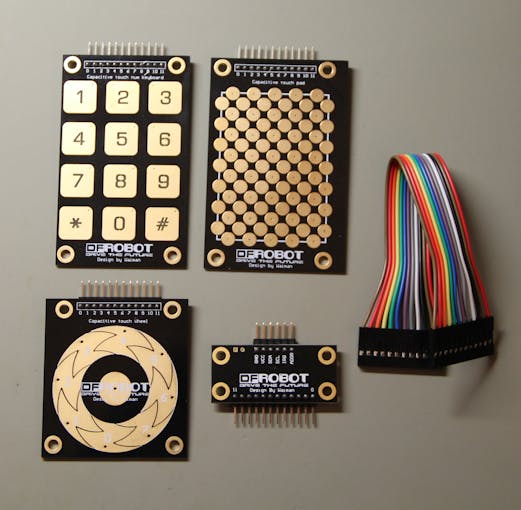
The kit brings 3 touchpads:
Numeric keypad
Wheel pad
Touch pad
Connector board and rainbow cable. The kit only allow the use of one pad at a time connected to the Arduino. To start you will need the touch kit library, available here. Download and install it on your Arduino Library folder.
Hardware components:
DFRobot Capacitive Touch Kit For Arduino
Arduino UNO & Genuino UNO
Schematic

Keypad Schematic
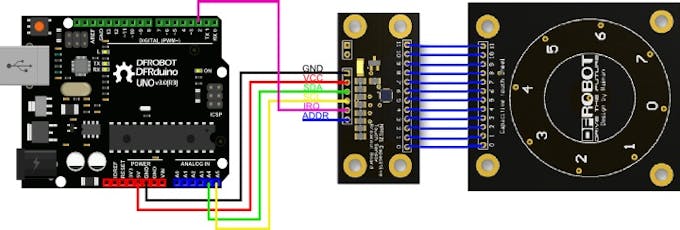
Wheel Schematic
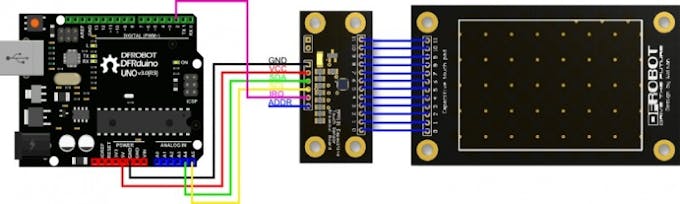
Touchpad Schematic
Just follow one of the schematic, to connect them in your arduino board.
The communication is done trough I2C (A4 and A5 for arduino UNO) and an adicional pin D2 (I did not confirm this but I think that this library need an interruption pin, so I do not know about compatibility with other boards)
Code
Just do to the example folder of your Arduino IDE locate the MPR121 folder and load the example code according to the keypad that you have connected.
Or upload the ones in the attachment files.
Test it.

CODE
/* TouchWheel.pde MPR121 WhellPad Example Code by:Waiman Zhao Mail:Binpower@foxmail.com created on: 11/2/14 license: CC-SA 3.0 Hardware: 3.3V Arduino Pro Mini SDA -> A4 SCL -> A5 IRQ -> D2 */ #include <Wire.h> #include <mpr121.h> int key = 0; // ========= setup ========= void setup() { // initialize function Serial.begin(19200); Wire.begin(); CapaTouch.begin(); delay(500); Serial.println("START"); } // ========= loop ========= void loop() { key=CapaTouch.keyPad(); if (key==1) { Serial.print("wheel:"); Serial.println("0"); } if (key==4) { Serial.print("wheel:"); Serial.println("1"); } if (key==7) { Serial.print("wheel:"); Serial.println("2"); } if (key==11) { Serial.print("wheel:"); Serial.println("3"); } if (key==2) { Serial.print("wheel:"); Serial.println("4"); } if (key==5) { Serial.print("wheel:"); Serial.println("5"); } if (key==8) { Serial.print("wheel:"); Serial.println("6"); } if (key==0) { Serial.print("wheel:"); Serial.println("7"); } if (key==3) { Serial.print("wheel:"); Serial.println("8"); } delay(200); }
Recent Blogs

Connect with DFRobot at Embedded World: Embedded Computing, IoT, Industrial Solutions
DFRobot is heading to Embedded World 2025 in Nuremberg, Germany, from March 11-13, and we’re bringing the latest in embedded computing, IoT, and industrial solutions.
NEWS Mar 07 2025

Scratch to Python: Mindplus Bridges the Gap between Block and Text-based Programming
This article introduces the Mind+(Mindplus) editor, which seamlessly combines block-based and text coding in its interface, facilitating an easier transition.
NEWS Jan 22 2025

What is I3C: The Next Generation of I2C
I3C improves on I2C with faster speeds, better power efficiency, and advanced features, unlocking greater potential for future embedded systems.
NEWS Jan 20 2025